[MOOC] Apollo Lesson 3: Localization
This is my note for lesson 3 of MOOC course: Self-Driving Fundamentals - Featuring Apollo. Content: How the vehicle localizes itself with a single-digit-centimeter-level accuracy.
Localization methods in Apollo
- The RTK (Real Time Kinematic) based method which incorporates GPS and IMU (Inertial Measurement Unit) information.
- The multi-sensor fusion method which incorporates GPS, IMU, and LiDAR information.
Inertial navigation
Global Navigation Satellite System (GNSS)
Global Navigation Satellite System (GNSS) refers to a constellation of satellites providing signals from space that transmit positioning and timing data to GNSS receivers. The receivers then use this data to determine location. Global Positioning System (GPS) is a kind of GNSS.
Properties:
- Accurate with RTK
- Poor performance in urban area and canyons
- Low frequency update (~10Hz) ➝ Too slow for realtime positioning on SDC.
Inertial Measurement Unit (IMU)
On Wikipedia: An inertial measurement unit (IMU) is an electronic device that measures and reports a body's specific force, angular rate, and sometimes the orientation of the body, using a combination of accelerometers, gyroscopes, and sometimes magnetometers.
Components of IMU:
- Accelerometer: measures velocity and acceleration
- Gyroscope: measures rotation and rotational rate
- Magnetometer: establishes cardinal direction (directional heading)
Disadvantage: The IMU's motion error increase with time.
GPS + IMU
We can combine GPS + IMU to localize the car. On one hand, IMU compensates for the low update frequency of GPS. On the other hand, GPS corrects the IMU's motion errors.
LiDAR Localization
With LiDAR, we can localize a car by means of point cloud matching. This method continuously matches the detected data from LiDAR sensors with the preexisting HD map. ➝ Require constantly updated HD map ➝ Very difficult.
Visual localization
Can we use images from cameras to localize the car?
Yes, but using only camera is hard. We often combine images with other sensor signals.
Particle Filter: We use particles or points on the map to estimate our most likely location.
Apollo Localization
Apollo localization using input from multiple sources and use Kalman Filter for sensor fusion.
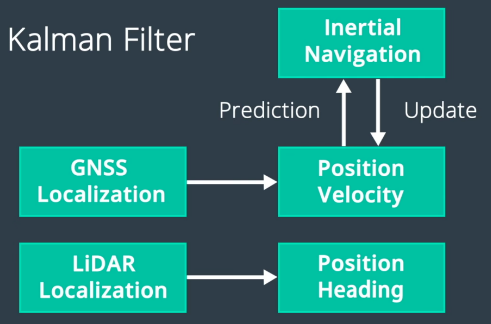
Sensor fusion for localization
Kidnapped Vehicle
TODO: Try Kidnapped Vehicle Project.